Votre panier
Il n'y a plus de produit dans votre panier 0 Voir le panier / Générer un devis / Vide
Connexion
Platine d' asservissement optionnelle pour actionneur linéaire

ACRM00197
Disponible 14,10 € TTC
11,75 € HT
Dont 0,01 € d'eco-participation déjà incluse dans le prix
Livré en kit cette platine est spécialement conçue pour permettre de gérer des contacts de fin de course sur les actionneurs linéaires ACRM00195 et ACRM00196. La platine permet également de gérer un asservissement de position de la crémailère.
Ne nécessitant que quelques opérations de soudure pour être opérationnelle, la platine intègre 2 contacts fin de course ainsi qu'une fourche optique conçue pour exploiter la présence de trous de repérage présents tout le long de la crémaillère des actionneurs linéaire ACRM00195 et ACRM00196.
En récupérant le signal de cette fourche optique et en sachant que les trous de repérage sont espacés tous les 5 mm, votre microcontrôleur pourra très facilement asservir la position de la crémaillère. Nous proposons cette platine au bas de la page si vous désirez équiper l'actionneur de celle-ci.
La platine est livrée avec un exemple de pilotage via une carte Arduino.
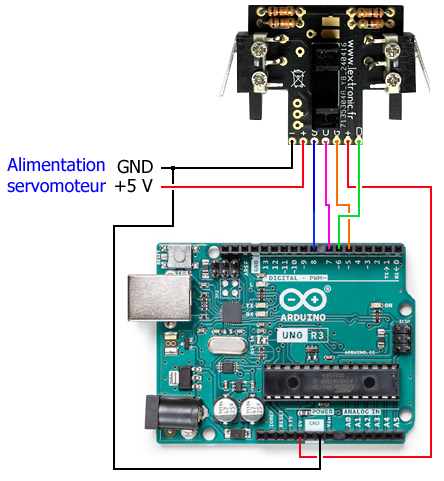
Ce programme s'apparente à une petite démo technique permettant de piloter l'actionneur linéaire ACRM00195 ou ACRM00196 par une carte Arduino en association avec la petite platine électronique optionnelle Ce programme va déplacer successivement la crémaillère de l'actionneur linéaire sur plusieurs positions en ayant recours à 3 fonctions spécialement crées pour l'occasion.
- La première fonction permet de faire revenir automatiquement la crémaillère complètement à gauche jusqu'au premier capteur de fin de course. Vous pouvez déterminer la vitesse avec laquelle la crémaillère se déplacera durant cette manœuvre.
- La seconde fonction permet de faire revenir automatiquement la crémaillère complètement à droite jusqu'au deuxième capteur de fin de course. Vous pouvez déterminer la vitesse avec laquelle la crémaillère se déplacera durant cette manœuvre.
- La troisième fonction permet de demander à la crémaillère de se déplacer jusqu'à une des 32 positions définies par les 32 trous présents sur celle-ci et d'arrêter de se déplacer une fois quelle à atteint cette position. Vous pouvez déterminer la vitesse avec laquelle la crémaillère se déplacera durant cette manœuvre.
Aucun avis
Il est nécessaire d'être connecté pour laisser un avis
Produits associés


Appuyez pour zoomer