Votre panier
Il n'y a plus de produit dans votre panier 0 Voir le panier / Générer un devis / Vide
Connexion
- Cartes programmables
- Cartes Arduino® officielles
- Cartes Arduino standards
- Cartes Arduino Nano
- Cartes Arduino MKR
- Cartes Arduino PRO
- Boitiers Arduino Opta
- Starters-kits Arduino
- Arduino Education
- Périphériques officiels Arduino
- Cartes compatibles Arduino®
- Cartes compatibles Uno
- Cartes compatibles Mega2560
- Cartes compatibles Leonardo
- Cartes compatibles Nano
- Cartes Adafruit Feather
- Jolly
- Cartes Pololu
- Cartes Seeed Studio
- Cartes Flip & Click
- Cartes Makey Makey
- Cartes Bare Conductive
- Cartes Whadda
- Autres cartes compatibles
- kits et accessoires pour Arduino®
- Starters kits pour Uno
- Starter kits pour Mega2560
- Starters kits pour Nano
- Autres starters kits
- Pack de composants seuls
- Connecteurs pour Arduino®
- Boitiers et supports pour Arduino®
- Alimentations pour Arduino®
- Robots programmables
- Ouvrages pour Arduino®
- Plaques de prototypage
- Straps souples
- Shields pour Arduino®
- Shield Proto pour Nano
- Shield Proto pour Uno
- Shield Proto pour Mega2560
- Shield leds et 7 segments
- Shield LCD alphanumériques
- Shield LCD graphiques
- Shield Bus communication
- Shield Bluetooth® - WiFi
- Shield LoRa - Sigfox - Xbee - GSM
- Shield RFID - NFC - GPS
- Shield applications vidéo
- Shield applications audio
- Shield relais - Mosfet
- Shield moteurs - robotique
- Shield fonctions diverses
- Périphériques compatibles Arduino®
- Cartes micro:bit
- Cartes et starters-kit
- Prototypage & Connectique
- Cartes d'applications
- Kits Vittascience - micro:bit
- Affichage leds
- Affichage LCD
- Capteurs
- Modules audio
- Robotique
- Jeux pour micro:bit
- Alimentation
- Boitiers pour micro:bit
- Cartes Pi Pico et RP2040
- Cartes et starter kits Pi PICO
- Cartes et modules sur base RP2040
- Cartes prototypage pour PI PICO
- Cartes moteurs pour PI PICO
- Cartes relais pour PI PICO
- Cartes afficheurs pour PI PICO
- Cartes météorologiques pour PI PICO
- Cartes Caméra pour Pi PICO
- Robots pour PI PICO et RP2040
- Cartes diverses pour PI PICO
- Ouvrages techniques pour PI PICO
- Raspberry Pi
- Cartes Raspberry
- Starters-kits Raspberry
- Accessoires pour Raspberry
- Boitiers pour Raspberry
- Caméras pour Raspberry
- Ouvrages pour Raspberry
- DAQ et Data Logging
- Shield Afficheurs leds
- Shield Afficheurs LCD
- Shield Afficheurs graphiques
- Accessoires arcade
- Robotique pour Raspberry
- Shield Entrées/sorties
- Shield Radiofréquence
- Shield capteurs
- Shield audio
- Shield divers
- Mini PC
- Digilent
- Cartes Digilent FPGA / SoC
- Plateformes radio logiciel
- Cartes et modules d'extensions
- DAQ et Data Logging
- Cartes MCU
- Programmateurs JTAG
- Equipements de tests et mesures
- Accessoires divers
- Compléments techniques
- Mikroelektronika
- Click Board
- Compilateurs
- Développement sur PIC
- Développement dsPIC
- Développement PIC32
- Développement ARM
- Développement AVR
- Développement FT90x
- Développement 8051
- Développement PSoC
- mikroLAB
- Afficheurs Mikromedia
- mikromedia HMI
- Bases analogiques
- Modules MCUCard
- Teensy
- OpenMV
- Arducam
- Caméras pour Raspberry Pi
- Caméras pour Arduino et Pi Pico
- Caméras SPI
- Accessoires pour caméras
- Objectifs pour caméras
- Modules XIAO
- M5Stack
- Modules ATOM M5Stack
- Modules M5Stick C
- Modules ESP32 Core IoT
- ESP8266 - ESP32
- Espruino
- Sollae Systems
- Passerelles E/S distantes
- Ports séries vers Eternet
- Modules port séries vers Ethernet
- Ports séries vers WLAN
- Passerelles OEM IoT PHPoC
- Cartes E-Textile
- Cartes Flora - Gemma
- Cartes Lilypad
- Périphériques E-Textile
- Consommables pour E-Textile
- CUBLOC
- Modules CUBLOC
- Principe des CUBLOC
- L'interface logiciel
- Les instructions
- Notes d'applications
- Applications CB210 (A)
- Applications CB210 (B)
- Applications CB210 (C)
- Notice STK1-CB210
- Vittascience
- Kits Vittascience - Arduino
- Kits Vittascience - micro:bit
- Kits Vittascience - ST Nucleo
- Kits Vittascience de base
- Autres Cartes
- Cartes Bare Conductive
- JoC - Javaino
- Halocode
- Pyboard - MicroPython
- Pycom
- RFduino
- Photon
- Intel® Edison
- Flyport OpenPicus
- mbed / Nucleo
- LCD 4D Systems
- Trenz Electronic
- Interfaces Android
- PICBASIC
- TinyPLC
- Arcades consoles
- neuron
- Autres cartes cœur Linux
- Onion
- Arietta
- UNIHIKER
- Radxa
- LattePanda
- Bases Zynq
- BeagleBone
- Cartes Arduino® officielles
- Capteurs et Prototypage
- Capteurs
- Packs de capteurs
- Accéléromètres 3 axes
- Air (qualité de l'air)
- Biométrie (empreintes digitales)
- Boussoles (magnétomètres)
- Boutons poussoirs
- Bruit - son
- Caméras numériques
- Caméras thermiques
- Capteurs capacitifs Trill Touch
- Chocs et vibrations
- Claviers
- Conductivité (peau et eau)
- Capteurs de couleur et Spectromètres
- Courant et tension
- Débitmètres (pour liquides)
- Déplacement rectiligne
- Distance (télémètres IR)
- Doppler (hyperfréquence)
- Effet Hall
- Encodeurs rotatif
- Environnementaux (météorologique)
- Fin de course (microrupteurs)
- Flexion (flex - bend sensor)
- Force ( FSR ) Ceradex
- Force ( FSR ) divers
- Fourches optiques
- Gaz
- GPS - GNSS - GLONASS
- Gyroscopes 3 axes
- Humidité
- Inclinaison - Tilt - Inclinomètre
- Infrarouge
- IMU et AHRS
- Interrupteurs
- Joysticks - Stick - Trackball
- Lecteurs code barre
- LiDAR Infrarouge Benewake
- Lumière et luminance
- Magnétiques
- Météo
- Mouvements de la main
- Niveau
- Pesage
- Pont RLC
- Pression
- Proximité
- Pulsation
- Qualité de l'eau
- RFID - NFC
- Rotation
- Serres automatisées
- Suiveur de ligne
- Tactiles
- Température
- Tensions
- Transducteurs à ultrasons
- Ultraviolets
- Modules Click Board
- Présentation
- Bus communication
- Convertisseurs
- Accel / Gyro / IMU
- Horloges RTC
- Air - Gaz
- Lumière - Infrarouge
- Température - Météo
- Magnétique / Pression
- Capteurs divers
- Modules audio
- Stockage mémoire
- Entrées - Sorties
- Modules d'affichage
- Interfaces saisies
- Interfaces moteurs
- Mesures et modules RF divers
- Modules GSM / GPRS
- Modules GPS / GNSS
- Modules WiFi
- Modules Bluetooth
- Modules ISM 433 / 868 MHz
- Modules XBee & 2.4 GHz
- Modules RFID / NFC
- Modules divers
- Pack Click
- Shield Click Board
- Modules Pmod
- Présentation Pmod
- Boutons - Interrupteurs
- Claviers - Joysticks
- Leds - afficheurs LCD
- Stockage Mémoire
- Modules convertisseurs
- Entrées / sorties
- Radio - Bus divers
- Accéléromètres - Gyro
- Capteurs divers
- Moteurs - Servos
- Modules divers
- Pmod Connecteurs
- Cordons pour Pmod
- Modules Grove
- Présentation
- Modules d'entrée Grove
- Actionneurs Grove
- Capteurs Grove
- Leds Grove
- Afficheurs Grove
- Radiofréquences Grove
- Grove pilotage moteurs
- Modules Grove divers
- Accessoires Grove
- Shields Grove
- Starter-kits Grove
- Modules Gravity
- Modules Qwiic / Stemma
- Modules OPENLEX
- Modules Makeblock
- Modules Whadda
- Modules et cartes pour Prototypage
- Cartes relais / triacs
- Extension d'E/S
- Interfaces BUS
- Interfaces TCP/IP
- Modules IR
- Convertisseurs "A/N - N/A"
- Horloges RTC
- Stockage mémoire
- Conversion niveau
- Conversion tension
- Modules biométriques
- Amplificateurs audio
- Acquisition vidéo
- Interfaces connectique
- Embases RJ45 isolées
- LCD demmel products
- LCD séries - I2C
- Modules divers
- Tinkerkit
- Proto sur PIC / AVR / 8051
- Interfaces audio
- Reconnaissance vocale
- Straps divers
- Breadboard
- SchmartBOARD
- Adaptateurs composants
- Logiciel de CAO
- Systèmes Radiofréquences
- Modules LoRa / SIGFOX
- FM 169/433/868 MHz
- Modules ATIM 868 MHz
- AM 433/868 MHz
- Modules XBee
- Modules Bluetooth
- Dongle Bluetooth
- Modules ZigBee
- Modules Wi-Fi
- Dongle et routeurs WiFi
- Modules GSM
- Modules GPS
- Modules RFID
- Modules divers
- Télécommandes radio
- Antennes
- Capteurs
- Robotique Imprimantes 3D
- Robots et accessoires
- Robots Makeblock
- Robots programmables
- Robots Pololu
- Robots simples
- Bases Châssis
- Châssis marcheurs
- Châssis robots roulants
- Châssis à chenilles
- Roues pour robots
- Roues libres - Roulettes
- Pinces robotiques
- Mains et Bras robotiques
- Tourelles - Mécanismes
- Systèmes de vision
- Pièces mécaniques
- Profilés et accessoires ACRZilla
- Profilés MakerBeam
- Profilés MakerBeam XS
- Profilés MakerBeam XL
- Profilés OpenBeam
- Profilés Makeblock
- Plaques et supports
- Visseries et entretoises
- Courroies et poulies
- Chaînes - Roues dentées
- Pignons
- Arbres - Roulements
- Mouvement rectiligne non motorisé
- Structures diverses
- Accessoires pneumatiques
- Moteurs et actionneurs
- Moteurs cc
- Moteurs solaires
- Motoréducteurs
- Moteurs avec encodeur
- Moteurs pas-à-pas
- Actionneurs linéaires
- Encodeurs
- Supports pour moteurs et servos
- Supports - Moyeux
- Servomoteurs
- Pompes air - eau
- Muscles électriques
- Solénoïdes et électro-aimants
- Eoliennes
- Commande et contrôleurs
- Drivers moteur cc
- Contrôleurs moteurs cc
- Drivers moteurs pas-à-pas
- Contrôleurs mot. pas-à-pas
- Clone Arduino moteurs
- Commande servomoteurs
- Imprimantes 3D / CNC
- Imprimantes 3D
- Bobines fils d'impression
- Machines CNC
- Profilés Makeblock
- Robots et accessoires
- Mesure et interfaces
- Gamme PeakTech
- Mesure électrotechnique
- Mesures environnementales
- Accessoires de mesure
- Appareils de mesures
- Multimètres
- Pinces ampèremétriques
- Mesure environnementale
- Caméras thermiques
- Autres mesures
- Mesures de tableau
- Wattmètres
- Pieds à coulisse
- Testeurs de composants
- Testeurs de piles
- Testeurs de câbles
- Traceurs de câbles
- Détecteurs d'ondes
- Multimètres Port USB
- Oscilloscopes
- Oscilloscopes de table
- Oscilloscopes portables
- Oscilloscopes USB
- Oscilloscopes OEM
- Sondes d'oscilloscope
- Générateurs
- Accessoires mesures
- Cordons bananes
- Cordons pour multimètres
- Sondes de température
- Cordons de mesures
- Sacoches
- Programmateurs
- Elnec
- Mikroelektronika
- Elprotronic
- Olimex
- Elektronikladen
- Digilent
- Test et développement
- Analyseurs logiques
- Analyseurs I2C / SPI / CAN
- Analyseurs USB
- Accessoires divers
- Interfaces - Acquisition
- Sollae Systems
- Boitiers MCC DAQ
- Boîtiers USB vers RS232/485
- Boitiers Labjack
- Boitiers TCP/IP - ports séries
- WLAN - port Série
- Interfaces TCP/IP vers E/S
- Interfaces bus CAN
- Modules USB vers RS232
- Modules USB vers E/S
- Modules TCP/IP vers Série
- Logiciels d'acquisition
- USB vers GPIB
- Cartes PCI vers RS232
- Gamme PeakTech
- Composants electroniques
- Composants
- Assortiments de composants
- Boîtes de rangement
- Buzzers divers
- Circuits intégrés
- Condensateurs
- Diodes
- Mémoires
- Microcontrôleurs
- Ponts de diodes
- Potentiomètres
- Régulateurs de tension
- Relais
- Résistances
- Quartz
- Selfs et inductances
- Thyristors et Triacs
- Transistors
- Varistances
- Optoélectronique
- Leds de 1.8 mm à 20 mm
- Leds infrarouges
- Flexibles leds filaments
- Led Filaments alphanumériques
- Rubans Leds
- Leds NeoPixel adressables
- Leds de puissance
- Supports de led
- Bargraphes à Leds
- Matrices à Leds standards
- Matrices à Leds séries
- 7 segments standards
- 7 segments séries
- Circuits commande de leds
- Voyants
- Ampoules et lucioles
- Photorésistances LDR
- Optocoupleurs
- Afficheurs LCD
- Afficheurs LCD graphiques
- Accessoires pour LCD
- Radiofréquence
- FM 169/433/868 MHz
- Modules LoRa / SIGFOX
- Modules XBee
- Modules ESP8266 - ESP32
- Modules Bluetooth
- Modules Wi-Fi
- Modules GSM
- Modules GPS
- Antennes
- Modules RFID
- Tag RFID
- AM 433/868 MHz
- Modules ZigBee
- Modules divers
- Module ATIM 868 MHZ
- Boutons Interrupteurs
- Interrupteurs à glissière
- Interrupteurs à levier
- Interrupteurs à bascule
- Boutons-poussoirs
- Pour bornes d'arcades
- Interrupteurs DIP
- Microrupteurs
- Encodeurs rotatifs
- Commutateurs rotatifs
- Commutateurs à clefs
- Roues codeuses
- Joysticks
- Interrupteurs thermiques
- ILS et aimants
- Claviers
- Refroidisseurs Fusibles
- Dissipateurs thermiques
- Pâtes thermiques
- Ventilateurs
- Accessoires ventilateurs
- Fusibles en verre et céramique
- Fusibles automobile
- Disjoncteurs réarmables
- Fusibles thermiques
- Fusibles divers
- Portes fusibles
- Circuits imprimés
- Plaques présensibilisées
- Plaques d'essais
- Plaques pastillées
- Entretoises et visserie
- Adaptateurs pour CI
- Fils de câblage
- Straps flexibles
- Aérosols
- Composants
- Câbles Boitiers Connectique
- Connecteurs
- Barrettes mâles/femelles
- Supports circuit intégré
- Borniers à vis
- Connecteurs spéciaux
- Connecteurs audio/vidéo
- Connecteurs informatiques
- Connecteurs Mesure & HF
- Connecteurs d'alimentation
- Connexions rapides
- Connecteurs pour ampoules
- Cosses pour câble
- Connecteurs multi contacts
- Fils Câbles Accessoires
- Rubans conducteur
- Fils de câblage
- Câbles coaxial 50 et 75 Ohms
- Câbles réseau LAN
- Câbles haut-parleurs
- Câbles en nappe
- Câbles téléphoniques
- Câble blindé multipaires
- Câble audio blindé
- Ferrites antiparasites
- Colliers et repérage
- Guides câbles
- Caches et gaines pour câbles
- Gaines thermo rétractables
- Cordons informatiques
- Boites murale RJ
- Cordons RJ45 (réseaux)
- Cordons USB 2.0
- Cordons USB 3.0
- Accessoires USB divers
- Cordons USB Smartphone
- Cordons DIN / mini-DIN
- Cordons SATA
- Cordons JEU / OBD
- Cordons parallèles
- Cordons série (RS232)
- Cordons VGA
- Cordons Audio / Vidéo
- Cordons et accessoires HDMI
- Cordons Jack 3,5 mm
- Cordons Pro Jack 6,35 mm
- Cordons et accessoires RCA
- Cordons Display Port
- Cordons et connecteurs SMA
- Cordons antenne TV/SAT
- Répartiteurs TV/SAT
- Cordons Optiques (Toslink)
- Cordons et accessoires VGA
- Cordons mini-DIN (S-Vidéo)
- Cordons Péritel (SCART)
- Cordons Pro XLR
- Autres cordons
- Cordons secteur 230 Vac
- Rallonges et multiprises
- Cordons véhicules électriques
- Cordons d'alimentation DC
- Cordons allume-cigares
- Cordons téléphoniques
- Cordons multi-contacts
- Cordons de mesures
- Boîtiers
- Boitiers TEKO
- Boitiers étanches
- Boîtiers en métal
- Boîtiers plastiques divers
- Boîtiers spéciaux
- Rack & Rail-DIN
- Passe-fils
- Pieds caoutchouc
- Connecteurs
- Alimentations piles et accus
- Alimentations
- Alimentations de labo
- Alimentations secourues
- Alimentations Rail DIN
- Alimentation pour éclairage Led
- Blocs secteur
- Transformateurs
- Transformateurs
- Convertisseurs AC AC
- Convertisseurs DC DC
- Convertisseurs DC AC
- Régulateurs
- Eoliennes expérimentales
- Energie solaire
- Kits pédagogiques
- Cellules solaires
- Panneaux solaires
- Piles et accus
- Coupleurs de piles
- Piles alcalines
- Piles Lithium
- Accus NiMH
- Accus NiMH téléphone et alarme
- Accus NiMH à cosses
- Accus Lithium
- Batteries au plomb
- Power Bank
- Chargeurs
- Chargeurs NiMH / NiCd
- Chargeurs accus au plomb
- Chargeurs smartphone / tablette
- Chargeurs sans fil
- Chargeurs sur allume cigare
- Chargeurs véhicules électriques
- Accessoires pour chargeurs
- Accessoires alimentation
- Connecteurs DC
- Câbles et cordons DC
- Câbles - Cordons AC
- Prises - Embases AC
- Multiprises - Rallonges AC
- Fusibles en verre et céramique
- Fusibles divers
- Portes fusibles
- Test - Mesure
- Alimentations
- Fer a souder et outillage pour électronique
- Matériel de soudage
- Fers à souder
- Fers à gaz
- Stations de soudages
- Stations de réparation
- Bain d'étamage
- Pompes et tresses à dessouder
- Supports de fer
- Bobines d'étain
- Tapis antistatiques
- Tapis de soudage
- Pannes de rechange pour fer
- Accessoires soudage
- Pinces et Tournevis
- Pinces coupantes/plates
- Pinces brucelles
- Pinces à dénuder
- Pinces à sertir
- Pinces spéciales
- Tournevis de précision
- Tournevis spéciaux
- Tournevis testeurs
- Jeux de tournevis
- Embouts tournevis
- Outillage divers
- Outils de coupe
- Limes et rapes
- Clés diverses
- Outils télécoms
- Outils de préhension
- Forêt / Alésoirs
- Electroportatif
- Sacoches pour outils
- Outils de mesure
- Mallettes d'outillage
- Nettoyeurs ultrason
- Lampes / loupes
- Loupes
- Lampes/loupes
- Etaux et 3ème mains
- Etaux divers
- 3ème main
- Matériel de soudage
- Son loisirs kits livres
- Kits et modules
- Alimentations
- Applications audio / hifi
- Applications domestiques
- Lumineux & domotique
- Timers et contrôleurs
- Kits éducatifs
- Kits et modules montés
- Kits et modules Kemo
- Kits et modules Cebek
- Kits et modules Whadda
- Ouvrages techniques
- Ouvrages arduino
- Ouvrages Raspberry
- Ouvrages BBC micro:bit
- PIC, AVR, et autres
- Programmation Scratch
- Robotique / Modélisme
- Ouvrages d'initiation
- Ouvrages étude technologique
- Livres radiofréquences
- Applications domestiques
- Son et lumière
- Ecouteurs
- Casques audio
- Haut-parleurs
- Accessoires enceintes
- Microphones
- Megaphones
- Talkies Walkies
- Amplificateurs audio
- Platines vinyles
- Enceintes Bluetooth
- Eclairage divers
- Commutateurs audio / vidéo
- Horloges et météo
- Montres connectées
- Réveil-matin
- Horloges murales
- Stations météo
- Multimédia
- Nedis
- Supports et motorisations TV
- Accessoires TV
- Accessoires gamer
- Réseaux LAN/WLAN
- Enceintes PC
- Claviers et souris
- Gamepad / Arcade
- Stockage de données
- Accessoires PC
- Accessoires Smartphones
- Kits et modules
- Alarmes, vidéo, contrôle d'accès et domotique
- Alarmes domestiques
- Centrales d'alarme
- Récepteurs pour centrales filaires
- Détecteurs périmétriques
- Détecteurs de mouvements
- Sirènes et buzzers
- Transmetteurs téléphoniques
- Flashs et voyants
- Générateur de brouillard
- Batteries -Piles
- Chargeurs
- Câbles et raccordement
- Outillages
- Accessoires
- Aide à l'installation
- Contrôle d'accès
- Carillons et sonnettes
- Portiers et vidéophones
- Claviers à codes
- Lecteurs d'accès
- Commandes radio
- Serrures à clef
- Gâches - Ventouses
- Vidéo surveillance
- Cameras de surveillances factices
- Caméras connectées SmartLife
- Caméras d'action embarquées
- Caméras animalières
- Accessoires pour vidéo filaire
- Domotique
- Gamme SmartLife
- Gamme Yokis
- Alarmes domestiques
Moteur pas à pas avec carte drivers

Ce moteur pas à pas 5 VDC est livré avec un mini module drivers basé sur un contrôleur CMS ULN2003. Il pourra être commandé par une plateforme Arduino® ou compatible.
Ce module Drivers à base d'un ULN2003 livré avec un moteur pas-à-pas 5Vcc se raccordera facilement sur 4 entrées digitales d'un module Arduino ou compatible (non livrés) et vous permettra de réaliser des applications robotique, automate, etc...
Caractéristiques :
- Alimentation: 5 Vcc
- Moteur pas-à-pas 28BYJ48 (4 phases)
- Avec led d'état CMS pour chaque phase
- Nombre de pas: 64
- Drivers ULN2003
- Dimensions moteur Ø 28 mm
- Dimensions module: 23 x 17 x 10 mm
Exemple de raccordement et code source: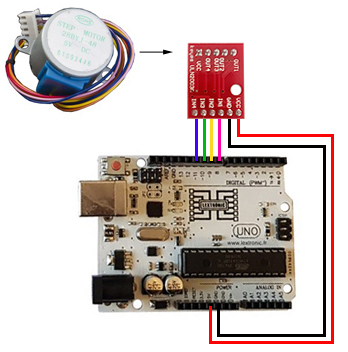
**** DEBUT DE CODE ****
// Déclaration des broches du module Drivers sur les GPIO de l'Arduino
int motorIn1 = 11; // IN1 fil rose sur GPIO 11 de l'Arduino
int motorIn2 = 10; // IN2 fil jaune sur GPIO 10 de l'Arduino
int motorIn3 = 9; // IN3 fil vert sur GPIO 9 de l'Arduino
int motorIn4 = 8; // IN4 fil bleu sur GPIO 8 de l'Arduino
// Déclaration des variable pour le moteur
int motorSpeed = 1200; // Vitesse
int count = 0; // Compteur de pas initialiser à 0
int countsperrev = 512; // Variable pas max par révolution
int lookup[8] = {B01000, B01100, B00100, B00110, B00010, B00011, B00001, B01001};
void setup()
{
// Déclaration des branchements du moteur en tant que sortie
pinMode(motorIn1, OUTPUT);
pinMode(motorIn2, OUTPUT);
pinMode(motorIn3, OUTPUT);
pinMode(motorIn4, OUTPUT);
Serial.begin(9600);
}
void loop()
{ if(count < countsperrev )
clockwise();
else if (count == countsperrev * 2)
count = 0;
else anticlockwise();
count++;
}
void anticlockwise()
{
for(int i = 0; i < 8; i++)
{
setOutput(i);
delayMicroseconds(motorSpeed);
}
}
void clockwise()
{
for(int i = 7; i >= 0;
i--)
{
setOutput(i);
delayMicroseconds(motorSpeed);
}
}
void setOutput(int out)
{
digitalWrite(motorIn1, bitRead(lookup[out], 0));
digitalWrite(motorIn2, bitRead(lookup[out], 1));
digitalWrite(motorIn3, bitRead(lookup[out], 2));
digitalWrite(motorIn4, bitRead(lookup[out], 3));
}
**** FIN DE CODE ****
Aucun avis
Il est nécessaire d'être connecté pour laisser un avis
Produits associés


Appuyez pour zoomer
Rubriques du site
- Cartes programmables
- Capteurs et Prototypage
- Capteurs
- Packs de capteurs
- Accéléromètres 3 axes
- Air (qualité de l'air)
- Biométrie (empreintes digitales)
- Boussoles (magnétomètres)
- Boutons poussoirs
- Bruit - son
- Caméras numériques
- Caméras thermiques
- Capteurs capacitifs Trill Touch
- Chocs et vibrations
- Claviers
- Conductivité (peau et eau)
- Capteurs de couleur et Spectromètres
- Courant et tension
- Débitmètres (pour liquides)
- Déplacement rectiligne
- Distance (télémètres IR)
- Doppler (hyperfréquence)
- Effet Hall
- Encodeurs rotatif
- Environnementaux (météorologique)
- Fin de course (microrupteurs)
- Flexion (flex - bend sensor)
- Force ( FSR ) Ceradex
- Force ( FSR ) divers
- Fourches optiques
- Gaz
- GPS - GNSS - GLONASS
- Gyroscopes 3 axes
- Humidité
- Inclinaison - Tilt - Inclinomètre
- Infrarouge
- IMU et AHRS
- Interrupteurs
- Joysticks - Stick - Trackball
- Lecteurs code barre
- LiDAR Infrarouge Benewake
- Lumière et luminance
- Magnétiques
- Météo
- Mouvements de la main
- Niveau
- Pesage
- Pont RLC
- Pression
- Proximité
- Pulsation
- Qualité de l'eau
- RFID - NFC
- Rotation
- Serres automatisées
- Suiveur de ligne
- Tactiles
- Température
- Tensions
- Transducteurs à ultrasons
- Ultraviolets
- Modules Click Board
- Présentation
- Bus communication
- Convertisseurs
- Accel / Gyro / IMU
- Horloges RTC
- Air - Gaz
- Lumière - Infrarouge
- Température - Météo
- Magnétique / Pression
- Capteurs divers
- Modules audio
- Stockage mémoire
- Entrées - Sorties
- Modules d'affichage
- Interfaces saisies
- Interfaces moteurs
- Mesures et modules RF divers
- Modules GSM / GPRS
- Modules GPS / GNSS
- Modules WiFi
- Modules Bluetooth
- Modules ISM 433 / 868 MHz
- Modules XBee & 2.4 GHz
- Modules RFID / NFC
- Modules divers
- Pack Click
- Shield Click Board
- Modules Pmod
- Modules Grove
- Modules Gravity
- Modules Qwiic / Stemma
- Modules OPENLEX
- Modules Makeblock
- Modules Whadda
- Modules et cartes pour Prototypage
- Cartes relais / triacs
- Extension d'E/S
- Interfaces BUS
- Interfaces TCP/IP
- Modules IR
- Convertisseurs "A/N - N/A"
- Horloges RTC
- Stockage mémoire
- Conversion niveau
- Conversion tension
- Modules biométriques
- Amplificateurs audio
- Acquisition vidéo
- Interfaces connectique
- Embases RJ45 isolées
- LCD demmel products
- LCD séries - I2C
- Modules divers
- Tinkerkit
- Proto sur PIC / AVR / 8051
- Interfaces audio
- Reconnaissance vocale
- Straps divers
- Breadboard
- SchmartBOARD
- Adaptateurs composants
- Logiciel de CAO
- Systèmes Radiofréquences
- Capteurs
- Robotique Imprimantes 3D
- Mesure et interfaces
- Composants electroniques
- Câbles Boitiers Connectique
- Alimentations piles et accus
- Fer a souder et outillage pour électronique
- Son loisirs kits livres
- Alarmes, vidéo, contrôle d'accès et domotique
- Nouveautes
- Produits obsolètes