Votre panier
Il n'y a plus de produit dans votre panier

Ce module basé sur un L298N permet la commander soit 2 moteurs CC (5 à 35 Vcc - 2 A max.) ou un moteur pas-à-pas.
Livré sans moteur, ce module sera idéal pour des applications robotiques. Grace à son drivers L298N (double pont en H), il vous permettra de piloter aussi bien 2 moteurs CC ou un moteur pas-à-pas (2 phases). Les raccordements des moteurs et alimentation externe s'effectuent sur des bornes à vis. Le raccordement pour la commande des moteurs s'effectue sur un connecteur mâle 8 broches au pas de 2,54 mm.
Caractéristiques:
- Drivers: L298N
- Entrée alimentation externe (pour vos moteurs): 5 Vcc à 35 Vcc
- Courant de sortie max. 2 A par canal
- Niveau logique: 5 Vcc
- Contrôle de niveau: bas -0,3V à 1,5V / haut: 2,3 V à Vss
- Puissance max: 25 W
- Dimensions: 69 x 56 x 36 mm
Vous trouverez ci-dessous le descriptif des différentes broches de raccordement du module ainsi que des exemples de codes sources pour Arduino.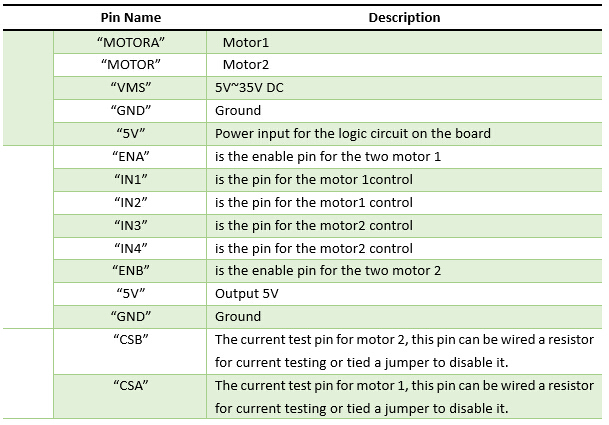
Exemple de code pour une utilisation avec 2 moteurs CC:
Connection:
IN1==========13;
IN2==========12;
IN3==========11;
IN4==========10;
int in1=13; int in2=12; int in3=11; int in4=10; int speedPinA=6; int speedPinB=5; void setup() { pinMode(in1,OUTPUT); pinMode(in2,OUTPUT); pinMode(in3,OUTPUT); pinMode(in4,OUTPUT); digitalWrite(in1,HIGH); digitalWrite(in2,HIGH); digitalWrite(in3,HIGH); digitalWrite(in4,HIGH); } void loop() { _mRight(in1,in2); _mRight(in3,in4); int n=analogRead(A0)/4; _mSetSpeed(speedPinA,n); _mSetSpeed(speedPinB,n); } void _mRight(int pin1,int pin2) { digitalWrite(pin1,HIGH); digitalWrite(pin2,LOW); } void _mLeft(int pin1,int pin2) { digitalWrite(pin1,LOW); digitalWrite(pin2,HIGH); } void _mStop(int pin1,int pin2) { digitalWrite(pin1,HIGH); digitalWrite(pin2,HIGH); } void _mSetSpeed(int pinPWM,int SpeedValue { analogWrite(pinPWM,SpeedValue); }
Exemple de code pour une utilisation avec un moteur pas-à-pas 2 phases:
Connection:
IN1=======8;
IN2=======9;
IN3=======10;
IN4=======11;
#include #define STEPS 100 Stepper stepper(STEPS, 8, 9, 10, 11); int previous = 0; void setup() { stepper.setSpeed(90); } void loop() { int val = analogRead(0); stepper.step(val - previous); previous = val; }
Produits associés

