Votre panier
Il n'y a plus de produit dans votre panier 0 Voir le panier / Générer un devis / Vide
Connexion
Châssis robotique Raspberry Pi WA12913 - Base roulante programmable
- Rupture de stock

WA12913
Rupture de stock 111,84 € TTC
93,20 € HT
Dont 0,06 € d'eco-participation déjà incluse dans le prix
Dotée de nombreux périphériques embarqués (capteurs IR, Led RGB...), cette base robotique roulante est spécialement conçue pour pouvoir être pilotée par une carte Raspberry Pi 3B+ ou 4 (non livrée).
La base robotique AlphaBot2-Ar "Acce Pack" est spécialement conçue pour l'initiation aux techniques de programmation à partir d'une plateforme Raspberry Pi 3 à ajouter.
- Le robot est vendu sans carte microSD, ni chargeur, ni batterie, ni pile.
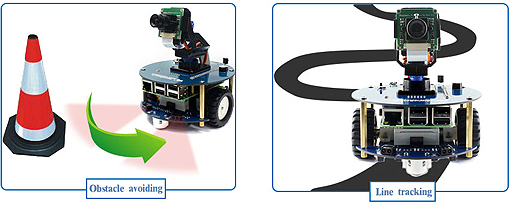
Cette dernière bénéficie de riches fonctionnalités tels que le suivi de lignes au sol (via ses capteurs IR), l'évitement d'obstacles (via des capteurs IR), la possibilité d'être pilotée à distance via sa télécommande infrarouge livrée.
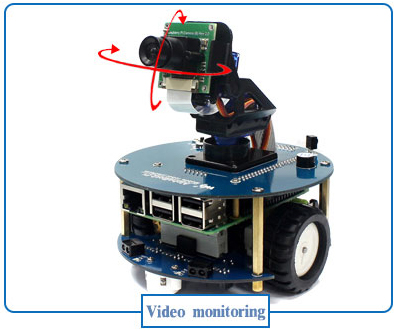
A noter également la présence d'un caméra 5 MP - 1080 p (avec une tourelle PAN-TILT actionnée par 2 petits servomoteurs).
Grâce à sa conception modulaire hautement intégrée, elle est assez facile à assembler par simple empilement de 2 platines électroniques (livrées pré-soudées).

Après quelques minutes consacrées à son assemblage, vous pourrez facilement tester les programmes de démonstration open source qui vous permettront de démarrer rapidement vos premiers projets.
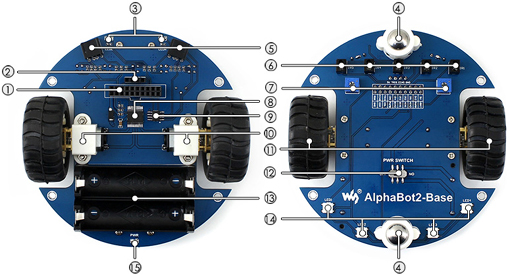
Vue dessous/dessus de la première platine électronique constituant la base robotique
01: Interface de l'AlphaBot2 (connexion entre les 2 platines électroniques)
02: Interface pour le module à ultrason
03: Leds indicatrices d'obstacle
04: Roue omnidirectionnelle
05: capteur photoélectrique infrarouge ST188 pour éviter les obstacles
06: Capteur IR "ITR20001" pour le suivi de lignes au sol
07: Potentiomètre de réglage (pour éviter les obstacles)
08: double pont en H "TB6612FNG" pour pilotage des moteurs
09: LM393 comparateur de tension
10: Micro- moteur micro N20 1:30 - 6 V / 600 RPM
11: Roues en caoutchouc (diamètre 42 mm - largeur 19mm)
12: Interrupteur "M/A"
13: Support pour batteries type 14500 (non livrée)
14: Led RGB type WS2812B
15: Led "Power"
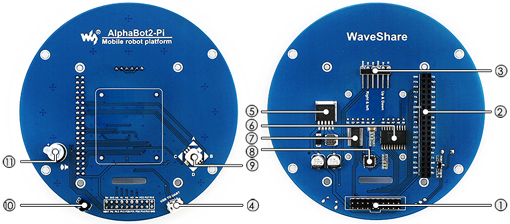
Vue dessous/dessus de la deuxième platine électronique constituant la base robotique
01: Interface de l'AlphaBot2 (connexion entre les 2 platines électroniques)
02: connecteur pour la platine Raspberry Pi 3
03: Interface pour servomoteur
04: Interface USB <> UART (pour pilotage simple via la Raspberry Pi 3)
05: Régulateur 5 V LM2596
06: convertisseur A/N 10 bits (TLC1543) permettant à la platine Raspberry Pi 3 de
récupérer les informations de capteurs à sortie analogique.
07: Contrôleur PCA9685 pour gestion précise du servomoteur de la tourelle
08: Convertisseur USB <> UART CP2102
09: mini joystick directionnel
10: Récepteur infrarouge
11: Buzzer
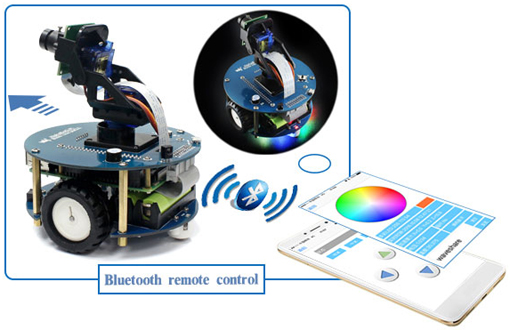
Grâce à l'étage de communication Bluetooth™ intégrée de la platine Raspberry Pi 3 (à ajouter) il vous sera ainsi possible également de piloter la base robotique à distance.
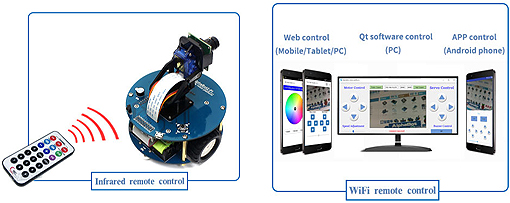
La base robotique pourra être pilotée à distance via sa télécommande infrarouge (pile à ajouter) ou également via un smartphone (via la communication WiFi™ intégrée de la platine Raspberry Pi 3 (à ajouter).
Pour pouvoir être fonctionnelle la base robotique nécessitera l'adjonction d'éléments additionnels (non livrés) tels qu'une plateforme Raspberry Pi 3, 2 accumulateurs type 14500, une carte microSD™ (non livrée).

Exemple de mise en oeuvre du capteur de détection d'obstacle
Exemple de pilotage de la base par un smartphone (non livré)
Exemple de pilotage des leds RVB par un smartphone (non livré)

Exemple de pilotage par un smartphone avec retour d'image (non livré)
![]()
Exemple d'utilisation de plusieurs bases Alphabot 2
Attention ce robot n'est pas un jouet. Son utilisation est strictement réservée aux personnes de plus de 14 ans. Ce dernier contient des petites pièces qu’un enfant plus jeune pourrait avaler ou inhaler.
- Datasheet du module
Aucun avis
Il est nécessaire d'être connecté pour laisser un avis
Produits associés




Appuyez pour zoomer