Votre panier
Il n'y a plus de produit dans votre panier
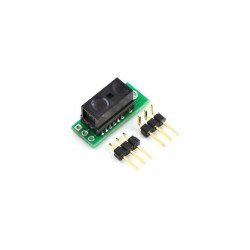
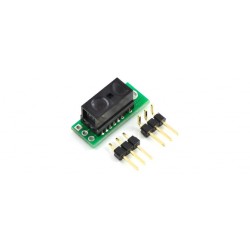
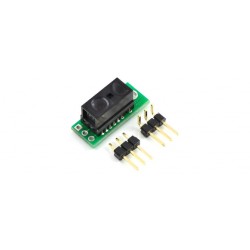
Supports pour télémètres IR GP2xxx
Cette paire de supports en aluminium vous permettra de fixer facilement vos télémètres infrarouges Sharp™ GP2xxx (non inclus) sur votre base robotique.
Référence : POL2678
3,23 € TTC - 2,69 € HT