Votre panier
Il n'y a plus de produit dans votre panier 0 Voir le panier / Générer un devis / Vide
Connexion
Capteur distance LiDAR TFLUNA Mesure précise 0.2 à 8m







- Rupture de stock







TF-LUNA
Rupture de stock 29,90 € TTC
24,92 € HT
Dont 0,01 € d'eco-participation déjà incluse dans le prix
Le TF-Luna de chez Benewake est un capteur LiDAR compact capable de mesurer les distances qui le sépare d'un obstacle de 0,2 m à 8 m avec une grande précision. Il communique ces informations au travers d'une liaison I2C ou série (niveau 3.3 V).
Destiné à mesurer des distances de 20 cm à 8 m, le capteur LiDAR TF-Luna de chez Benewake, basé sur le principe d'une détection ToF, incorpore des optiques spéciales associées à une électronique appropriée afin de bénéficier d'une détection stable, précise, de haute sensibilité et de haute vitesse (idéal pour application robotique ludique).
ToF est l'abréviation de la technologie Time of Flight. Son principe de fonctionnement est le suivant: une lumière infrarouge modulée est émise par le capteur et réfléchie par un objet; la distance de l'objet à détecter est convertie par le capteur en calculant la différence de temps ou la différence de phase entre l'émission de lumière et la réflexion de la lumière, de façon à produire l'information de "profondeur".
Le module dispose d'une connexion sur un cordon 15 cm (livré) doté d'un connecteur JST SH 6 broches (avec un pas de 1 mm). Le pilotage avec votre microcontrôleur (non livré) peut se faire au choix en UART (TTL) ou en I2C. Vous trouverez en téléchargement la documentation complète ainsi que des exemples de codes pour Arduino® ou compatible.
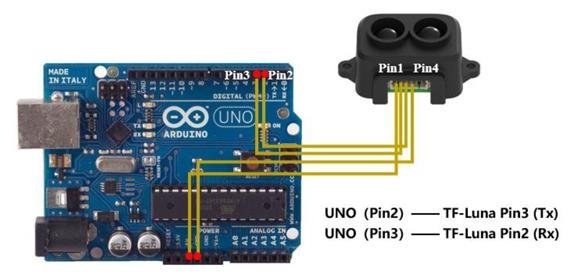
Exemple de raccordement avec une carte Arduino® (non livrée)
Attention les broches de communication du microcontrôleur que vous utiliserez pour piloter le module LiDAR TF-Luna devront être compatibles avec le niveau logique 3,3 Vcc. Le module est compatible avec les cartes Arduino® / Pixhawk / Raspberry Pi / Teensy 3.5. Si vous utilisez un microcontrôleur avec des signaux de communication dotés d'un niveau logique 5 Vcc, vous endommagerez le module Lidar (non pris en compte par la garantie). Dans tous les cas, en cas de doute, nous vous invitons à utiliser un petit module de conversion de niveau additionnel tel que le POL2595 par exemple. Gardez également à l'esprit que le module LiDAR ne dispose pas de protection contre les inversions de polarité ou surtensions.
Caractéristiques:
- Alimentation: 3,7 à 5,2 Vcc
- Consommation: ≤0,35 W
- Courant: ≤70 mA (150 mA en pointe)
- Portée: 0,2 à 8 mètres max (* fonction de la réflectivité de l'objet à détecter)
- Immunité lumière ambiante: 70 Klux
- Angle de détection (FoV): 2°
- Précision: ±6 cm (0,2 à 3 m) et ±2% (de 3 à 8 m)
- Résolution: 1 cm
- Longueur d'onde: 850 nm
- Fréquence de mesure: 1à 250 Hz
- Interface: UART (niveau 3.3 V) / I2C (niveau 3.3 V)
- I2C: jusqu'à 400 KHz - Mode esclave
- UART: jusqu'à 115200 / 8 bit de données / 1 bit de stop / sans parité
- Adresse I2C: 0x08 à 0x77 (0x10 par défaut)
- Sortie sur câble 15 cm avec connecteur JST SH 6 contacts (pas 1,25 mm)
- Température d'utilisation: -10°C à +60°C
- Dimensions: 35 x 21,25 x 12,5 mm
- Poids: 5 g
* La portée max. n'est plus que de 2,5 m si l'objet n'à qu'une réflectivité de 10 %
Ce module LiDAR ne doit en aucun cas être utilisé pour la détection d'une présence humaine ou animale en milieux dangereux, ni pour une utilisation pouvant générer une situation dangereuse (de quelque nature soit-elle) en cas de défaillance.
- Site du fabricant
Aucun avis
Il est nécessaire d'être connecté pour laisser un avis
Produits associés



Appuyez pour zoomer