Votre panier
Il n'y a plus de produit dans votre panier 0 Voir le panier / Générer un devis / Vide
Connexion
Capteur de distance 5 cm Pololu 4050 à sortie numérique
- Nouveau

Ce capteur de distance basé sur un LiDAR à interface numérique qui passe à l'état bas lors de la présence d'un obstacle (par défaut à moins de 5 cm) fonctionne avec une tension d'entrée de 3 à 5 V.
Ce petit capteur de distance basé sur LiDAR détecte la présence d’objets dans un rayon de 5 cm (par défaut). Il possède une sortie numérique unique qui passe (par défaut) à l’état bas lorsqu’un objet est détecté (sinon, elle reste à l’état haut). Il fonctionne avec une tension d’entrée comprise entre 3,0V et 5,5V et son espacement de broches de 2,54 mm facilite son utilisation avec des plaques de prototypage sans soudure standard et des plaques pastillées de 2,54 mm.
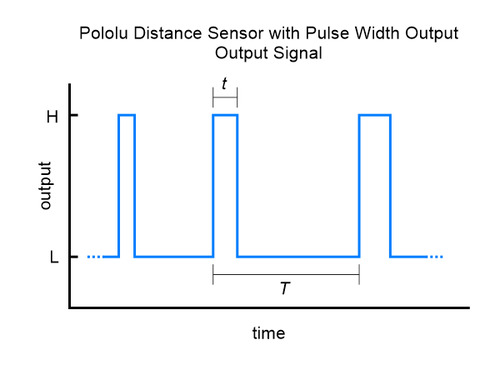
Principe de fonctionnement du capteur de distance Pololu 4050
Ce capteur compact est un excellent moyen de détecter rapidement la présence d’objets à proximité. Tant qu’il est alimenté, il effectue des mesures de distance en continu et utilise une sortie numérique unique pour indiquer si un objet est détecté dans sa plage de détection. La sortie passe à l’état bas lorsque le capteur détecte un objet, sinon, elle reste à l’état haut.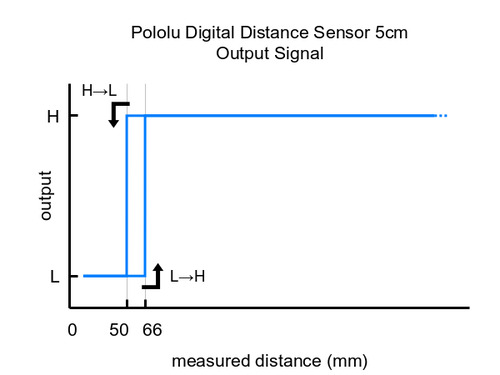
Par défaut, veuillez noter que ce capteur indique uniquement la présence d’un objet dans sa plage de détection le long de sa ligne de visée, sans fournir d’information sur sa distance. Comme illustré dans le schéma ci-dessus, une hystérésis est présente au seuil de portée maximale afin d’assurer une transition propre lorsque les objets franchissent ce seuil. Le capteur peut détecter des objets jusqu’à environ 5 mm de sa face avant. Il est possible de modifier la sortie de fonctionnement en PWM (à la place de tout-ou-rien) afin d'avoir une information de la distance qui le sépare d'un obstacle en modifiant les cavaliers 1, 2,3, 4 (voir plus bas).
Contrairement aux capteurs optiques plus simples qui détectent les objets en fonction de l’intensité de la lumière réfléchie, ce capteur utilise un module LiDAR à courte portée pour mesurer précisément le temps que mettent les impulsions de lumière infrarouge, à atteindre l’objet le plus proche et à être réfléchies. Cela permet au capteur d’être largement indépendant de la réflectivité des objets et des conditions d’éclairage ambiantes (bien que la portée puisse être réduite pour des objets à très faible réflectance).
Quelques exemples d’applications :
- Détecteur d’obstacles ou pare-chocs sans contact pour robot
- Élément d’interface sans contact pour activer un appareil ou un processus
- Compteur ou minuteur d’objets lors de leur passage
Utilisation du capteur de distance Pololu 4050
Trois connexions sont nécessaires pour utiliser ce module : VIN, GND et OUT. Ces broches sont accessibles via une rangée de trous traversants au pas de 2,54 mm compatibles avec des connecteurs mâles et femelles (vendus séparément).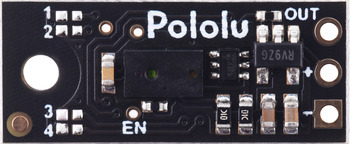
- La broche VIN (+) doit être connectée à une source de 3 V à 5,5 V.
- La broche GND (-) doit être connectée à 0 V.
- La broche OUT passe à l’état bas (0 V) lorsqu’un objet est détecté et à l’état haut (au niveau VIN) lorsqu’aucun objet n’est détecté.
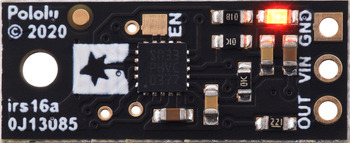
Une LED rouge située au dos de la carte s’allume également lorsqu’un objet est détecté.
La carte possède également un trou de fixation conçu pour être utilisé avec une vis M2 (non livrée).
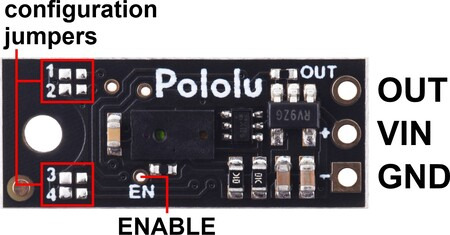
La carte dispose d’une broche ENABLE qui peut être mise à l’état bas pour passer en mode basse consommation, réduisant la consommation à environ 0,4 mA. Cette broche est accessible via un trou métallisé (sur la face avant) ou sur une pastille carrée située au dos de la carte, étiquetée "EN" sur la sérigraphie. Si la broche ENABLE est tirée vers VIN, activant ainsi le capteur par défaut.
La carte dispose de quatre cavaliers de configuration CMS (4, 3, 2, 1) qui déterminent la portée de détection maximale, la fréquence de rafraichissement, l'hystérésis et le mode de fonctionnement (tout ou rien ou PWM). Par défaut (aucun cavalier) le module est configuré en sortie tout-ou-rien avec une portée max. de 5 cm, une hystérésis de 16 mm et un taux de rafraichissement de 145 Hz. En soudant des ponts de soudures ou des résistances de 0 Ω (non livrées) ils est possible de modifier les caractéristiques du module selon le tableau ci dessous:
| Description | Portée Max.* | Hystérésis | Résolution | Fréquence | Cavaliers (4321) |
|---|---|---|---|---|---|
| Sortie numérique (5 cm) | 5 cm | 16 mm | - | 145 Hz | 0000 |
| Sortie numérique (haute sensibilité) | 5 cm | 16 mm | - | 65 Hz | 0001 |
| Sortie numérique (10 cm) | 10 cm | 20 mm | - | 115 Hz | 0010 |
| Sortie numérique (haute sensibilité) | 10 cm | 20 mm | - | 30 Hz | 0011 |
| Sortie numérique (15 cm) | 15 cm | 24 mm | - | 95 Hz | 0100 |
| Sortie numérique (haute sensibilité) | 15 cm | 24 mm | - | 15 Hz | 0101 |
| Sortie numérique (20 cm) | 20 cm | 28 mm | - | 70 Hz | 0110 |
| Sortie numérique (haute sensibilité) | 20 cm | 28 mm | - | 15 Hz | 0111 |
| Sortie numérique (30 cm) | 30 cm | 36 mm | - | 37 Hz | 1000 |
| Sortie numérique (haute sensibilité) | 30 cm | 36 mm | - | 15 Hz | 1001 |
| Sortie numérique, toute détection | ~50 cm | - | - | 50 Hz | 1010 |
| Sortie numérique, toute détection | ~100 cm | - | - | 15 Hz | 1011 |
| Sortie PWM (15 cm) | ~15 cm | - | 1 mm (= 4 µs) | 145 Hz (190 Hz max) | 1100 |
| Sortie PWM (35 cm) | ~35 cm | - | 2 mm (= 4 µs) | 95 Hz (165 Hz max) | 1101 |
| Sortie PWM (50 cm) | ~50 cm | - | 3 mm (= 4 µs) | 50 Hz (110 Hz max) | 1110 |
| Sortie PWM (100 cm) | ~100 cm | - | 3 mm (= 4 µs) | 15 Hz (110 Hz max) | 1111 |
*La portée effective dépend de la réflectivité de l'objet et des conditions d'éclairage ambiant.
Avec le mode de fonctionnement de sortie configuré en PWM, il vous sera alors possible de connaître la distance qui sépare le capteur d'un obstacle avec une résolution de 1 à 3 mm et une fréquence de rafraichissement comprise entre 15 Hz à 145 Hz suivant la distance de détection Max. (voir tableau ci-dessus).
Caractéristiques:
- Tension de fonctionnement : 3,0 V à 5,5 V
- Consommation : 30 mA (typique) lorsqu’activé (0,4 mA lorsqu’il est désactivé)
- Portée maximale : 5 cm (par défaut) à 100 cm (avec réglage cavaliers)
- Portée minimale : < 5 mm
- Taux de rafraichissement (par défaut) : 15 Hz (6,9 ms)
- Champ de vision (FOV) : 15° typique ; peut varier en fonction de la réflectance des objets et des conditions ambiantes
- Sortie: signal numérique tout-ou-rien (par défaut) ou PWM (avec réglage cavaliers)
- Type de sortie : niveau bas lorsqu’un objet est détecté, haut sinon)
- 4 cavaliers CMS de configuration (portée, fréquence, hystérésis et type de sortie tout-ou-rien ou PWM)
- Dimensions : 21,6 × 8,9 × 3,1 mm
- Poids : 0,4 g
Pololu met à disposition plusieurs exemples de codes sources pour Arduino et BBC micro:bit en utilisation de sortie en largeur d'impulsion PWM.
Exemples de programme pour BBC micro:bit pour lire la sortie à largeur d'impulsion (PWM)
Voici un programme crée sous MakeCode qui permet de lire et convertir la sortie du capteur de distance Pololu avec sortie à largeur d'impulsion, 50 cm max. La sortie du programme peut être visualisée dans la console de l'appareil MakeCode, qui trace également les mesures sur un graphique. Vous pouvez ouvrir le programme dans l'éditeur MakeCode du micro:bit en cliquant sur ce lien (MakeCode pour micro:bit).
Exemple de programme pour Arduino pour lire la sortie à largeur d'impulsion (PWM)
Il s'agit d'un code source simple qui lit la sortie du capteur de distance Pololu avec sortie à largeur d'impulsion, 50 cm max. et affiche la distance mesurée en millimètres.
| 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 | // Example Arduino program for reading the Pololu Distance Sensor with Pulse Width Output, 50cm Max// Change this to match the Arduino pin connected to the sensor's OUT pin.const uint8_t sensorPin = 2;void setup(){ Serial.begin(115200);}void loop(){ int16_t t = pulseIn(sensorPin, HIGH); if (t == 0) { // pulseIn() did not detect the start of a pulse within 1 second. Serial.println("timeout"); } else if (t > 1850) { // No detection. Serial.println(-1); } else { // Valid pulse width reading. Convert pulse width in microseconds to distance in millimeters. int16_t d = (t - 1000) * 3 / 4; // Limit minimum distance to 0. if (d < 0) { d = 0; } Serial.print(d); Serial.println(" mm"); }} |
- Dimensions
Aucun avis
Il est nécessaire d'être connecté pour laisser un avis
Produits associés






Appuyez pour zoomer