Votre panier
Il n'y a plus de produit dans votre panier- 1152 views
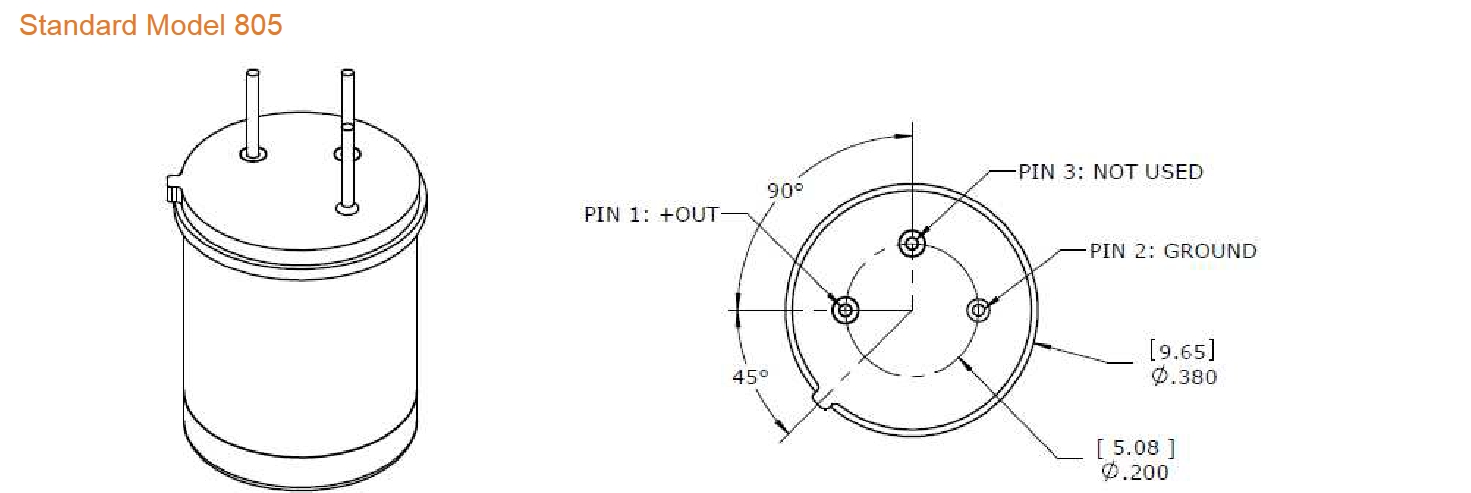
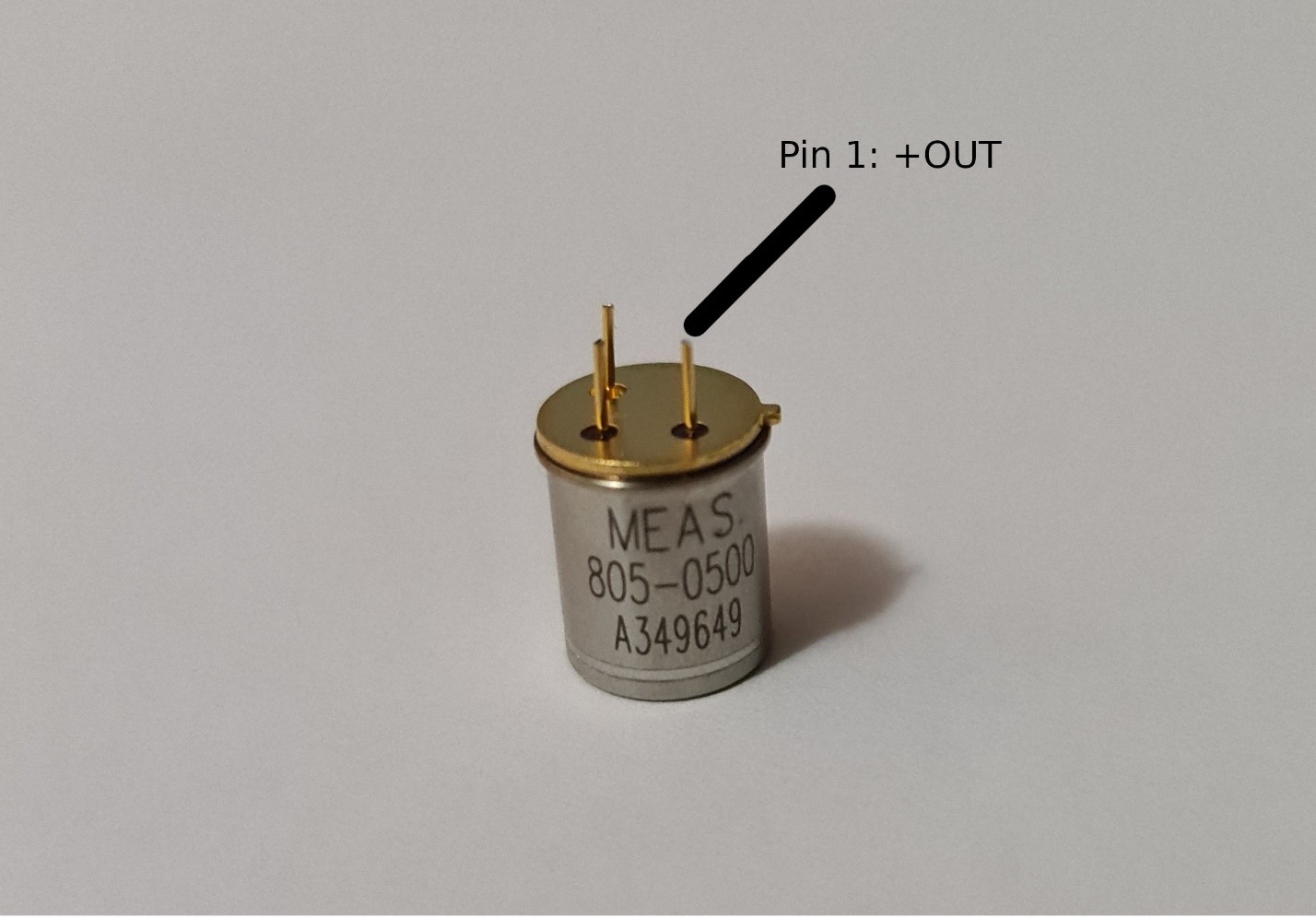
Ce projet montre comment construire un système de mesure d'accélération à l'aide d'un ordinateur monocarte Raspberry Pi avec un capteur accéléromètre piézoélectrique électronique intégré (IEPE) connecté à une carte MCC 172 DAQ HAT (Hardware Attached at Top). Les capteurs IEPE peuvent mesurer l'accélération, la pression ou la force. Ils contiennent une électronique de conversion indépendante intégrée, qui convertit le signal du capteur piézoélectrique en un signal de tension à faible impédance. Le projet utilise l'accéléromètre modèle 805 500G IEPE T05-3 (voir fiche technique) de TE connectivity pour détecter les accélérations, les vibrations ou les chocs mécaniques. Sa sortie se connecte au canal 0 d'un HAT DAQ de mesure IEPE MCC 172 de Measurement Computing Corporation (MCC), qui est monté sur une carte Raspberry Pi.
Le MCC 172 dispose de deux canaux d'entrée pour les mesures acoustiques et vibratoires avec des capteurs IEPE. Il dispose d'un A/N 24 bits par canal avec un taux d'échantillonnage maximum de 51,2 kSPS par canal. Le dispositif 805-0500 est un accéléromètre à faible coût IEPE à 3 broches bien adapté aux applications embarquées utilisant un format TO-5. Il a une plage dynamique de ±500 g et une bande passante allant jusqu'à 12 kHz.
Le Raspberry Pi doit avoir une copie de travail de Raspbian OS installée. Le projet nécessite également le système de contrôle de version GIT, la bibliothèque standard Python et la bibliothèque MCC DAQ HAT de MCC.
Configuration du logiciel et du matériel
Tout d'abord, nous avons configuré la bibliothèque pour le HAT, en suivant les instructions décrites dans le fichier readme.md du référentiel GIT de la bibliothèque. Pour d'autres tâches ou plus d'informations, consultez la documentation de la bibliothèque MCC DAQ HAT6. Ensuite, nous devons télécharger les fichiers main.py et daqhats_utils.py depuis le site Web de Digilent et les placer dans le dossier du projet.
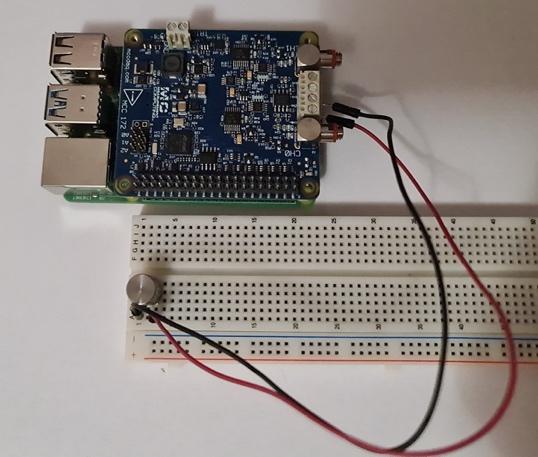
Pour ce projet, nous montons l'accéléromètre sur plaque de prototypage breadboard et connectons les sorties de l'appareil aux bornes à vis du canal 0 sur le MCC 172.
Dans le script main.py, nous lisons le résultat de la conversion à partir de la carte, vérifions tout dépassement et incrémentons le nombre d'échantillons lus. Enfin, nous affichons les derniers échantillons à l'écran, calculons et affichons les tensions RMS (Root Mean Square). La fonction écrira également tous les résultats dans un fichier journal. Une fois fait, la boucle recommence.
Exécution du projet
Ayant tout en place, nous lançons le script. Il affiche certaines informations sur la carte, crée le fichier journal et affiche enfin les valeurs brutes et les tensions RMS.
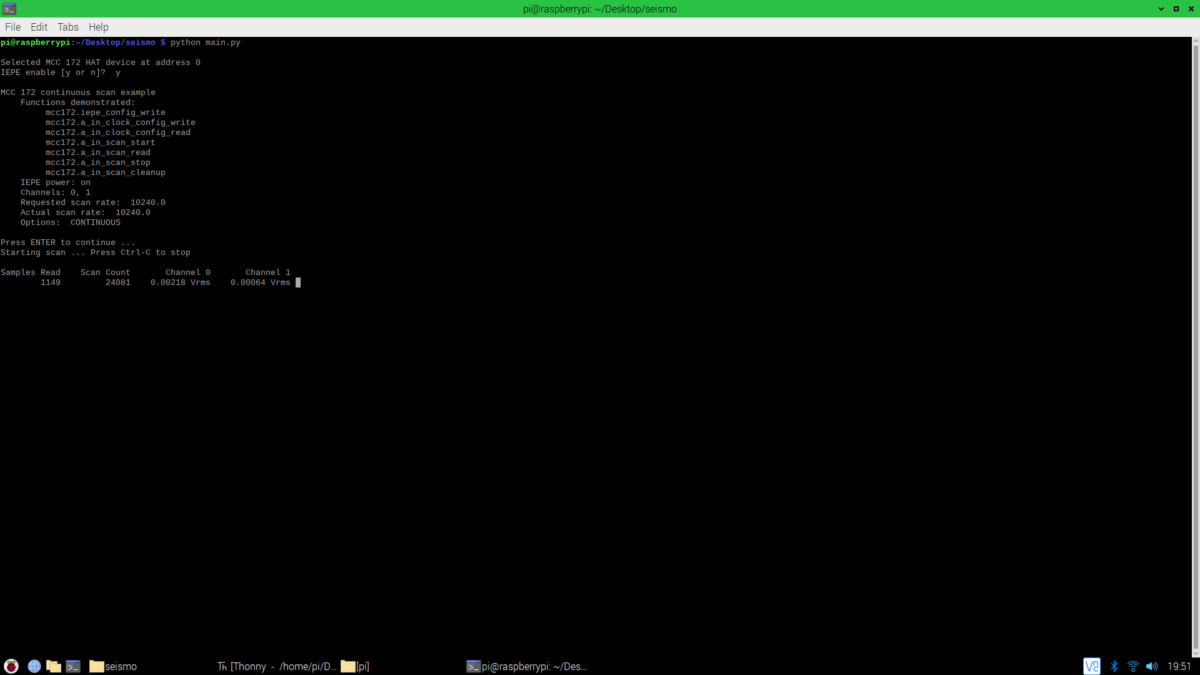
Figure 2 : Affichage du terminal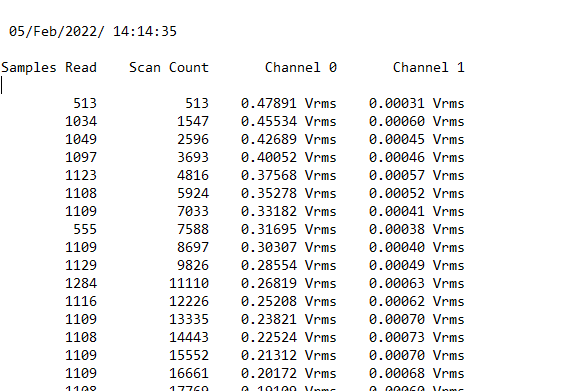
Figure 3 : Contenu du fichier Log
Vous pouvez obtenir tous les détails du projet et le code source sur le blog de Digilent.
Crédits : @ Digilent inc.