Votre panier
Il n'y a plus de produit dans votre panier 0 Voir le panier / Générer un devis / Vide
Connexion
- Cartes programmables
- Cartes Arduino® officielles
- Cartes Arduino standards
- Cartes Arduino Nano
- Cartes Arduino MKR
- Cartes Arduino PRO
- Boitiers Arduino Opta
- Starters-kits Arduino
- Arduino Education
- Périphériques officiels Arduino
- Cartes compatibles Arduino®
- Cartes compatibles Uno
- Cartes compatibles Mega2560
- Cartes compatibles Leonardo
- Cartes compatibles Nano
- Cartes Adafruit Feather
- Jolly
- Cartes Pololu
- Cartes Seeed Studio
- Cartes Flip & Click
- Cartes Makey Makey
- Cartes Bare Conductive
- Cartes Whadda
- Autres cartes compatibles
- kits et accessoires pour Arduino®
- Starters kits pour Uno
- Starter kits pour Mega2560
- Starters kits pour Nano
- Autres starters kits
- Pack de composants seuls
- Connecteurs pour Arduino®
- Boitiers et supports pour Arduino®
- Alimentations pour Arduino®
- Robots programmables
- Ouvrages pour Arduino®
- Plaques de prototypage
- Straps souples
- Shields pour Arduino®
- Shield Proto pour Nano
- Shield Proto pour Uno
- Shield Proto pour Mega2560
- Shield leds et 7 segments
- Shield LCD alphanumériques
- Shield LCD graphiques
- Shield Bus communication
- Shield Bluetooth® - WiFi
- Shield LoRa - Sigfox - Xbee - GSM
- Shield RFID - NFC - GPS
- Shield applications vidéo
- Shield applications audio
- Shield relais - Mosfet
- Shield moteurs - robotique
- Shield fonctions diverses
- Périphériques compatibles Arduino®
- Cartes micro:bit
- Cartes et starters-kit
- Prototypage & Connectique
- Cartes d'applications
- Kits Vittascience - micro:bit
- Affichage leds
- Affichage LCD
- Capteurs
- Modules audio
- Robotique
- Jeux pour micro:bit
- Alimentation
- Boitiers pour micro:bit
- Cartes Pi Pico et RP2040
- Cartes et starter kits Pi PICO
- Cartes et modules sur base RP2040
- Cartes prototypage pour PI PICO
- Cartes moteurs pour PI PICO
- Cartes relais pour PI PICO
- Cartes afficheurs pour PI PICO
- Cartes météorologiques pour PI PICO
- Cartes Caméra pour Pi PICO
- Robots pour PI PICO et RP2040
- Cartes diverses pour PI PICO
- Ouvrages techniques pour PI PICO
- Raspberry Pi
- Cartes Raspberry
- Starters-kits Raspberry
- Accessoires pour Raspberry
- Boitiers pour Raspberry
- Caméras pour Raspberry
- Ouvrages pour Raspberry
- DAQ et Data Logging
- Shield Afficheurs leds
- Shield Afficheurs LCD
- Shield Afficheurs graphiques
- Accessoires arcade
- Robotique pour Raspberry
- Shield Entrées/sorties
- Shield Radiofréquence
- Shield capteurs
- Shield audio
- Shield divers
- Digilent
- Cartes Digilent FPGA / SoC
- Plateformes radio logiciel
- Cartes et modules d'extensions
- DAQ et Data Logging
- Cartes MCU
- Programmateurs JTAG
- Equipements de tests et mesures
- Accessoires divers
- Compléments techniques
- Mikroelektronika
- Click Board
- Compilateurs
- Développement sur PIC
- Développement dsPIC
- Développement PIC32
- Développement ARM
- Développement AVR
- Développement FT90x
- Développement 8051
- Développement PSoC
- mikroLAB
- Afficheurs Mikromedia
- mikromedia HMI
- Bases analogiques
- Modules MCUCard
- Teensy
- OpenMV
- Arducam
- Caméras pour Raspberry Pi
- Caméras pour Arduino et Pi Pico
- Caméras SPI
- Accessoires pour caméras
- Objectifs pour caméras
- Modules XIAO
- M5Stack
- Modules ATOM M5Stack
- Modules M5Stick C
- Modules ESP32 Core IoT
- ESP8266 - ESP32
- Espruino
- Sollae Systems
- Passerelles E/S distantes
- Ports séries vers Eternet
- Modules port séries vers Ethernet
- Ports séries vers WLAN
- Passerelles OEM IoT PHPoC
- Cartes E-Textile
- Cartes Flora - Gemma
- Cartes Lilypad
- Périphériques E-Textile
- Consommables pour E-Textile
- CUBLOC
- Modules CUBLOC
- Principe des CUBLOC
- L'interface logiciel
- Les instructions
- Notes d'applications
- Applications CB210 (A)
- Applications CB210 (B)
- Applications CB210 (C)
- Notice STK1-CB210
- Vittascience
- Kits Vittascience - Arduino
- Kits Vittascience - micro:bit
- Kits Vittascience - ST Nucleo
- Kits Vittascience de base
- Autres Cartes
- Cartes Bare Conductive
- JoC - Javaino
- Halocode
- Pyboard - MicroPython
- Pycom
- RFduino
- Photon
- Intel® Edison
- Flyport OpenPicus
- mbed / Nucleo
- LCD 4D Systems
- Trenz Electronic
- Interfaces Android
- PICBASIC
- TinyPLC
- Arcades consoles
- neuron
- Autres cartes cœur Linux
- Onion
- Arietta
- UNIHIKER
- Radxa
- LattePanda
- Bases Zynq
- BeagleBone
- Cartes Arduino® officielles
- Capteurs et Prototypage
- Capteurs
- Packs de capteurs
- Accéléromètres 3 axes
- Air (qualité de l'air)
- Biométrie (empreintes digitales)
- Boussoles (magnétomètres)
- Boutons poussoirs
- Bruit - son
- Caméras numériques
- Caméras thermiques
- Capteurs capacitifs Trill Touch
- Chocs et vibrations
- Claviers
- Conductivité (peau et eau)
- Capteurs de couleur et Spectromètres
- Courant et tension
- Débitmètres (pour liquides)
- Déplacement rectiligne
- Distance (télémètres IR)
- Doppler (hyperfréquence)
- Effet Hall
- Encodeurs rotatif
- Environnementaux (météorologique)
- Fin de course (microrupteurs)
- Flexion (flex - bend sensor)
- Force ( FSR ) Ceradex
- Force ( FSR ) divers
- Fourches optiques
- Gaz
- GPS - GNSS - GLONASS
- Gyroscopes 3 axes
- Humidité
- Inclinaison - Tilt - Inclinomètre
- Infrarouge
- IMU et AHRS
- Interrupteurs
- Joysticks - Stick - Trackball
- Lecteurs code barre
- LiDAR Infrarouge Benewake
- Lumière et luminance
- Magnétiques
- Météo
- Mouvements de la main
- Niveau
- Pesage
- Pont RLC
- Pression
- Proximité
- Pulsation
- Qualité de l'eau
- RFID - NFC
- Rotation
- Serres automatisées
- Suiveur de ligne
- Tactiles
- Température
- Tensions
- Transducteurs à ultrasons
- Ultraviolets
- Modules Click Board
- Présentation
- Bus communication
- Convertisseurs
- Accel / Gyro / IMU
- Horloges RTC
- Air - Gaz
- Lumière - Infrarouge
- Température - Météo
- Magnétique / Pression
- Capteurs divers
- Modules audio
- Stockage mémoire
- Entrées - Sorties
- Modules d'affichage
- Interfaces saisies
- Interfaces moteurs
- Mesures et modules RF divers
- Modules GSM / GPRS
- Modules GPS / GNSS
- Modules WiFi
- Modules Bluetooth
- Modules ISM 433 / 868 MHz
- Modules XBee & 2.4 GHz
- Modules RFID / NFC
- Modules divers
- Pack Click
- Shield Click Board
- Modules Pmod
- Présentation Pmod
- Boutons - Interrupteurs
- Claviers - Joysticks
- Leds - afficheurs LCD
- Stockage Mémoire
- Modules convertisseurs
- Entrées / sorties
- Radio - Bus divers
- Accéléromètres - Gyro
- Capteurs divers
- Moteurs - Servos
- Modules divers
- Pmod Connecteurs
- Cordons pour Pmod
- Modules Grove
- Présentation
- Modules d'entrée Grove
- Actionneurs Grove
- Capteurs Grove
- Leds Grove
- Afficheurs Grove
- Radiofréquences Grove
- Grove pilotage moteurs
- Modules Grove divers
- Accessoires Grove
- Shields Grove
- Starter-kits Grove
- Modules Gravity
- Modules Qwiic / Stemma
- Modules OPENLEX
- Modules Makeblock
- Modules Whadda
- Modules et cartes pour Prototypage
- Cartes relais / triacs
- Extension d'E/S
- Interfaces BUS
- Interfaces TCP/IP
- Modules IR
- Convertisseurs "A/N - N/A"
- Horloges RTC
- Stockage mémoire
- Conversion niveau
- Conversion tension
- Modules biométriques
- Amplificateurs audio
- Acquisition vidéo
- Interfaces connectique
- Embases RJ45 isolées
- LCD demmel products
- LCD séries - I2C
- Modules divers
- Tinkerkit
- Proto sur PIC / AVR / 8051
- Interfaces audio
- Reconnaissance vocale
- Straps divers
- Breadboard
- SchmartBOARD
- Adaptateurs composants
- Logiciel de CAO
- Systèmes Radiofréquences
- Modules LoRa / SIGFOX
- FM 169/433/868 MHz
- Modules ATIM 868 MHz
- AM 433/868 MHz
- Modules XBee
- Modules Bluetooth
- Dongle Bluetooth
- Modules ZigBee
- Modules Wi-Fi
- Dongle et routeurs WiFi
- Modules GSM
- Modules GPS
- Modules RFID
- Modules divers
- Télécommandes radio
- Antennes
- Capteurs
- Robotique Imprimantes 3D
- Robots et accessoires
- Robots Makeblock
- Robots programmables
- Robots Pololu
- Robots simples
- Bases Châssis
- Châssis marcheurs
- Châssis robots roulants
- Châssis à chenilles
- Roues pour robots
- Roues libres - Roulettes
- Pinces robotiques
- Mains et Bras robotiques
- Tourelles - Mécanismes
- Systèmes de vision
- Pièces mécaniques
- Profilés et accessoires ACRZilla
- Profilés MakerBeam
- Profilés MakerBeam XS
- Profilés MakerBeam XL
- Profilés OpenBeam
- Profilés Makeblock
- Plaques et supports
- Visseries et entretoises
- Courroies et poulies
- Chaînes - Roues dentées
- Pignons
- Arbres - Roulements
- Mouvement rectiligne non motorisé
- Structures diverses
- Accessoires pneumatiques
- Moteurs et actionneurs
- Moteurs cc
- Moteurs solaires
- Motoréducteurs
- Moteurs avec encodeur
- Moteurs pas-à-pas
- Actionneurs linéaires
- Encodeurs
- Supports pour moteurs et servos
- Supports - Moyeux
- Servomoteurs
- Pompes air - eau
- Muscles électriques
- Solénoïdes et électro-aimants
- Eoliennes
- Commande et contrôleurs
- Drivers moteur cc
- Contrôleurs moteurs cc
- Drivers moteurs pas-à-pas
- Contrôleurs mot. pas-à-pas
- Clone Arduino moteurs
- Commande servomoteurs
- Imprimantes 3D / CNC
- Imprimantes 3D
- Bobines fils d'impression
- Machines CNC
- Profilés Makeblock
- Robots et accessoires
- Mesure et interfaces
- Gamme PeakTech
- Mesure électrotechnique
- Mesures environnementales
- Accessoires de mesure
- Appareils de mesures
- Multimètres
- Pinces ampèremétriques
- Mesure environnementale
- Caméras thermiques
- Autres mesures
- Mesures de tableau
- Wattmètres
- Pieds à coulisse
- Testeurs de composants
- Testeurs de piles
- Testeurs de câbles
- Traceurs de câbles
- Détecteurs d'ondes
- Multimètres Port USB
- Oscilloscopes
- Oscilloscopes de table
- Oscilloscopes portables
- Oscilloscopes USB
- Oscilloscopes OEM
- Sondes d'oscilloscope
- Générateurs
- Accessoires mesures
- Cordons bananes
- Cordons pour multimètres
- Sondes de température
- Cordons de mesures
- Sacoches
- Programmateurs
- Elnec
- Mikroelektronika
- Elprotronic
- Olimex
- Elektronikladen
- Digilent
- Test et développement
- Analyseurs logiques
- Analyseurs I2C / SPI / CAN
- Analyseurs USB
- Accessoires divers
- Interfaces - Acquisition
- Sollae Systems
- Boitiers MCC DAQ
- Boîtiers USB vers RS232/485
- Boitiers Labjack
- Boitiers TCP/IP - ports séries
- WLAN - port Série
- Interfaces TCP/IP vers E/S
- Interfaces bus CAN
- Modules USB vers RS232
- Modules USB vers E/S
- Modules TCP/IP vers Série
- Logiciels d'acquisition
- USB vers GPIB
- Cartes PCI vers RS232
- Gamme PeakTech
- Composants electroniques
- Composants
- Assortiments de composants
- Boîtes de rangement
- Buzzers divers
- Circuits intégrés
- Condensateurs
- Diodes
- Mémoires
- Microcontrôleurs
- Ponts de diodes
- Potentiomètres
- Régulateurs de tension
- Relais
- Résistances
- Quartz
- Selfs et inductances
- Thyristors et Triacs
- Transistors
- Varistances
- Optoélectronique
- Leds de 1.8 mm à 20 mm
- Flexibles leds filaments
- Led Filaments alphanumériques
- Leds infrarouges
- Leds de puissance
- Leds NeoPixel adressables
- Rubans Leds
- Supports de led
- Bargraphes à Leds
- Matrices à Leds standards
- Matrices à Leds séries
- 7 segments standards
- 7 segments séries
- Circuits commande de leds
- Voyants
- Ampoules et lucioles
- Photorésistances LDR
- Optocoupleurs
- Afficheurs LCD
- Afficheurs LCD graphiques
- Accessoires pour LCD
- Radiofréquence
- FM 169/433/868 MHz
- Modules LoRa / SIGFOX
- Modules XBee
- Modules ESP8266 - ESP32
- Modules Bluetooth
- Modules Wi-Fi
- Modules GSM
- Modules GPS
- Antennes
- Modules RFID
- Tag RFID
- AM 433/868 MHz
- Modules ZigBee
- Modules divers
- Module ATIM 868 MHZ
- Boutons Interrupteurs
- Interrupteurs à glissière
- Interrupteurs à levier
- Interrupteurs à bascule
- Boutons-poussoirs
- Pour bornes d'arcades
- Interrupteurs DIP
- Microrupteurs
- Encodeurs rotatifs
- Commutateurs rotatifs
- Commutateurs à clefs
- Roues codeuses
- Joysticks
- Interrupteurs thermiques
- ILS et aimants
- Claviers
- Refroidisseurs Fusibles
- Dissipateurs thermiques
- Pâtes thermiques
- Ventilateurs
- Accessoires ventilateurs
- Fusibles en verre et céramique
- Fusibles automobile
- Disjoncteurs réarmables
- Fusibles thermiques
- Fusibles divers
- Portes fusibles
- Circuits imprimés
- Plaques présensibilisées
- Plaques d'essais
- Plaques pastillées
- Entretoises et visserie
- Adaptateurs pour CI
- Fils de câblage
- Straps flexibles
- Aérosols
- Composants
- Câbles Boitiers Connectique
- Connecteurs
- Barrettes mâles/femelles
- Supports circuit intégré
- Borniers à vis
- Connecteurs spéciaux
- Connecteurs audio/vidéo
- Connecteurs informatiques
- Connecteurs Mesure & HF
- Connecteurs d'alimentation
- Connexions rapides
- Connecteurs pour ampoules
- Cosses pour câble
- Connecteurs multi contacts
- Fils Câbles Accessoires
- Rubans conducteur
- Fils de câblage
- Câbles coaxial 50 et 75 Ohms
- Câbles réseau LAN
- Câbles haut-parleurs
- Câbles en nappe
- Câbles téléphoniques
- Câble blindé multipaires
- Câble audio blindé
- Ferrites antiparasites
- Colliers et repérage
- Guides câbles
- Caches et gaines pour câbles
- Gaines thermo rétractables
- Cordons informatiques
- Boites murale RJ
- Cordons RJ45 (réseaux)
- Cordons USB 2.0
- Cordons USB 3.0
- Accessoires USB divers
- Cordons USB Smartphone
- Cordons DIN / mini-DIN
- Cordons SATA
- Cordons JEU / OBD
- Cordons parallèles
- Cordons série (RS232)
- Cordons VGA
- Cordons Audio / Vidéo
- Cordons et accessoires HDMI
- Cordons Jack 3,5 mm
- Cordons Pro Jack 6,35 mm
- Cordons et accessoires RCA
- Cordons Display Port
- Cordons et connecteurs SMA
- Cordons antenne TV/SAT
- Répartiteurs TV/SAT
- Cordons Optiques (Toslink)
- Cordons et accessoires VGA
- Cordons mini-DIN (S-Vidéo)
- Cordons Péritel (SCART)
- Cordons Pro XLR
- Autres cordons
- Cordons secteur 230 Vac
- Rallonges et multiprises
- Cordons véhicules électriques
- Cordons d'alimentation DC
- Cordons allume-cigares
- Cordons téléphoniques
- Cordons multi-contacts
- Cordons de mesures
- Boîtiers
- Boitiers TEKO
- Boitiers étanches
- Boîtiers en métal
- Boîtiers plastiques divers
- Boîtiers spéciaux
- Rack & Rail-DIN
- Passe-fils
- Pieds caoutchouc
- Connecteurs
- Alimentations piles et accus
- Alimentations
- Alimentations de labo
- Alimentations secourues
- Alimentations Rail DIN
- Alimentation pour éclairage Led
- Blocs secteur
- Transformateurs
- Transfo
- Convertisseurs AC AC
- Convertisseurs DC DC
- Convertisseurs DC AC
- Régulateurs
- Eoliennes expérimentales
- Energie solaire
- Kits pédagogiques
- Cellules solaires
- Panneaux solaires
- Piles et accus
- Coupleurs de piles
- Piles alcalines
- Piles Lithium
- Accus NiMH
- Accus NiMH téléphone et alarme
- Accus NiMH à cosses
- Accus Lithium
- Batteries au plomb
- Power Bank
- Chargeurs
- Chargeurs NiMH / NiCd
- Chargeurs accus au plomb
- Chargeurs smartphone / tablette
- Chargeurs sans fil
- Chargeurs sur allume cigare
- Chargeurs véhicules électriques
- Accessoires pour chargeurs
- Accessoires alimentation
- Connecteurs DC
- Câbles et cordons DC
- Câbles - Cordons AC
- Prises - Embases AC
- Multiprises - Rallonges AC
- Fusibles en verre et céramique
- Fusibles divers
- Portes fusibles
- Test - Mesure
- Alimentations
- Fer a souder et outillage pour électronique
- Matériel de soudage
- Fers à souder
- Fers à gaz
- Stations de soudages
- Stations de réparation
- Bain d'étamage
- Pompes et tresses à dessouder
- Supports de fer
- Bobines d'étain
- Tapis antistatiques
- Tapis de soudage
- Pannes de rechange pour fer
- Accessoires soudage
- Pinces et Tournevis
- Pinces coupantes/plates
- Pinces brucelles
- Pinces à dénuder
- Pinces à sertir
- Pinces spéciales
- Tournevis de précision
- Tournevis spéciaux
- Tournevis testeurs
- Jeux de tournevis
- Embouts tournevis
- Outillage divers
- Outils de coupe
- Limes et rapes
- Clés diverses
- Outils télécoms
- Outils de préhension
- Forêt / Alésoirs
- Electroportatif
- Sacoches pour outils
- Outils de mesure
- Mallettes d'outillage
- Nettoyeurs ultrason
- Lampes / loupes
- Loupes
- Lampes/loupes
- Etaux et 3ème mains
- Etaux divers
- 3ème main
- Matériel de soudage
- Son loisirs kits livres
- Kits et modules
- Alimentations
- Applications audio / hifi
- Applications domestiques
- Lumineux & domotique
- Timers et contrôleurs
- Kits éducatifs
- Kits et modules montés
- Kits et modules Kemo
- Kits et modules Cebek
- Kits et modules Whadda
- Ouvrages techniques
- Ouvrages arduino
- Ouvrages Raspberry
- Ouvrages BBC micro:bit
- PIC, AVR, et autres
- Programmation Scratch
- Robotique / Modélisme
- Ouvrages d'initiation
- Ouvrages étude technologique
- Livres radiofréquences
- Applications domestiques
- Son et lumière
- Ecouteurs
- Casques audio
- Haut-parleurs
- Accessoires enceintes
- Microphones
- Megaphones
- Talkies Walkies
- Amplificateurs audio
- Platines vinyles
- Enceintes Bluetooth
- Eclairage divers
- Commutateurs audio / vidéo
- Horloges et météo
- Montres connectées
- Réveil-matin
- Horloges murales
- Stations météo
- Multimédia
- Nedis
- Supports et motorisations TV
- Accessoires TV
- Accessoires gamer
- Réseaux LAN/WLAN
- Enceintes PC
- Claviers et souris
- Gamepad / Arcade
- Stockage de données
- Accessoires PC
- Accessoires Smartphones
- Kits et modules
- Alarmes, vidéo, contrôle d'accès et domotique
- Alarmes domestiques
- Centrales d'alarme
- Récepteurs pour centrales filaires
- Détecteurs périmétriques
- Détecteurs de mouvements
- Sirènes et buzzers
- Transmetteurs téléphoniques
- Flashs et voyants
- Générateur de brouillard
- Batteries -Piles
- Chargeurs
- Câbles et raccordement
- Outillages
- Accessoires
- Aide à l'installation
- Contrôle d'accès
- Carillons et sonnettes
- Portiers et vidéophones
- Claviers à codes
- Lecteurs d'accès
- Commandes radio
- Serrures à clef
- Gâches - Ventouses
- Vidéo surveillance
- Cameras de surveillances factices
- Caméras connectées SmartLife
- Caméras d'action embarquées
- Caméras animalières
- Accessoires pour vidéo filaire
- Domotique
- Gamme SmartLife
- Gamme Yokis
- Alarmes domestiques
Actionneur linéaire ACRZilla 12 V - 95 mm - 16,5 mm/s - 500 N






ACRM00000
Disponible 66,00 € TTC
55,00 € HT
Dont 0,12 € d'eco-participation déjà incluse dans le prix
Actionneur linéaire ACRZilla - Course 95 mm - Vitesse 16.5 mm/s - 500 N (push) - IP65
Propulsé par un moteur cc 12 V, cet actionneur linaire compact de forte puissance est idéalement conçu pour une utilisation au sein de multiples applications.
Sa tige bénéficie d'une course de 95 mm. Le simple fait d'alimenter l'actionneur permet de déployer sa tige. Une fois arrivée en fin de course la tige sera stoppée automatiquement. Il vous faudra alimenter à nouveau l'actionneur en inversant la polarité pour rétracter sa tige. La tige stoppera à nouveau sa course une fois complètement rentrée dans l'actionneur.
Note : De part le fait que le moteur de l'actionneur soit enfermé dans un boitier doté d'une étanchéité IP65 (sans système d'aération), il est IMPERATIF de respecter les règles ci-dessous sous peine d'échauffement trop important du moteur et de sa destruction (non pris en compte par la garantie) :
- L'actionneur ne doit pas être utilisé de façon continuelle durant plus de 2 mn.
- Un ratio (temps d'utilisation / repos) < 20 % du temps doit être respecté lors de l'utilisation de l'actionneur. Ainsi par exemple dans le cas d'une utilisation continuelle de l'actionneur pendant une durée de 2 mn, il sera impératif de respecter un arrêt d'utilisation prolongé de ce dernier durant 18 mn.
Caractéristiques techniques :
- Moteur : 12 Vcc
- Consommation : 1.5 A (sans charge)
- Consommation : 2.5 A (avec charge)
- Rapport 20:1
- Vitesse max. : 16.5 mm/s
- Charge maximale : 500 N
- Température de fonctionnement : +10 à 40 °C
- Niveau de bruit : < 65 dB
- Boitier : IP65
Exemple du pilotage de l'actionneur linéaire à l'aide d'une carte Arduino et d'un module d'interface 2 relais :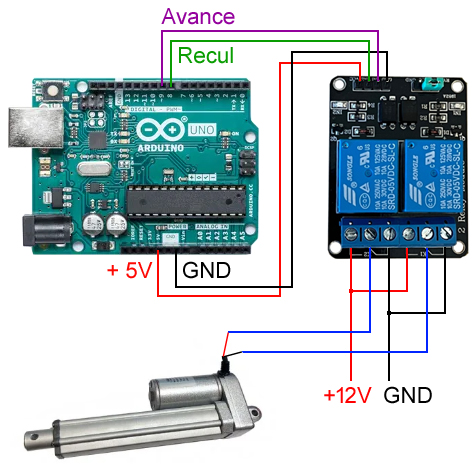
Les ports 8 et 9 de l'Arduino permettent de gérer l'avance et le recul de la tige de l'actionneur linéaire.
En mettant les 2 ports 8 et 9 au niveau logique haut, l'actionneur linéaire est stoppé.
En mettant le port 9 au niveau logique bas et le port 8 au niveau logique haut, la tige de l'actionneur linéaire avance.
En mettant le port 8 au niveau logique bas et le port 9 au niveau logique haut, la tige de l'actionneur linéaire recul.
Aucun avis
Il est nécessaire d'être connecté pour laisser un avis
Appuyez pour zoomer
Rubriques du site
- Cartes programmables
- Capteurs et Prototypage
- Robotique Imprimantes 3D
- Robots et accessoires
- Pièces mécaniques
- Profilés et accessoires ACRZilla
- Profilés MakerBeam
- Profilés MakerBeam XS
- Profilés MakerBeam XL
- Profilés OpenBeam
- Profilés Makeblock
- Plaques et supports
- Visseries et entretoises
- Courroies et poulies
- Chaînes - Roues dentées
- Pignons
- Arbres - Roulements
- Mouvement rectiligne non motorisé
- Structures diverses
- Accessoires pneumatiques
- Profilés et accessoires ACRZilla
- Moteurs et actionneurs
- Commande et contrôleurs
- Imprimantes 3D / CNC
- Robots et accessoires
- Mesure et interfaces
- Composants electroniques
- Câbles Boitiers Connectique
- Alimentations piles et accus
- Fer a souder et outillage pour électronique
- Son loisirs kits livres
- Alarmes, vidéo, contrôle d'accès et domotique
- Nouveautes
- Produits obsolètes